

현대엔지비에서 주관하는 자율주행(제어) 매치업특강 인증평가를 위한 특강을 들었습니다.
인천대학교 공과대학 강창묵 교수님께서 실시간 강의해주셨습니다.
내용을 간략히 정리하고 생각을 간단히 정리했습니다.
그 동안 들어온 강의들의 정리와 인증평가를 위한 강의이므로 제어 도메인 개론 수준의 내용입니다.
제어는 인지+판단+실행이다.
따라서 제어 엔지니어는 모든 걸 할줄 아는 만능 엔지니어이다.
ADAS 시스템은 차량의 종방향, 횡방향으로 나눌 수 있다.
종방향은 앞뒤, 횡방향은 좌우
종방향 제어는 구동과 제어를 내가 원하는대로 한다는 걸 말한다.
AEB의 경우 Time to Collision 파라미터가 주요하다.
뒷 차량이 더 느릴 경우 음수값을 가져 충돌히지 않는다.
종방향+횡방향 어플리케이션은 FCA, FCA-JT가 있다. 조향을 포함한다.
제어기의 구성 -> 피드백 제어기를 하기 위해서 어떤 출력값을 피드백 받아야 함.
즉 속도값을 피드백 받음. 바퀴의 회전수로 차의 속도 파악. 오차를 줄이기 위해 페달 제어, 연료량 제어함.
크루즈 컨트롤은 브레이크를 사용하지 않음. 주로 기어 변속으로 제어함.
ACC는 앞차량과의 상대거리를 피드백받아 지정된 목표거리와 오차 계산 및 제어
횡방향, 조향은 선회운동 및 원하는 속도/각속도 도달이 목표이다.
이 경우 차선을 인지하기 위해 카메라를 많이 사용함.
조향시스템은 운전대 회전 시 연결된 각 기구부를 움직여주고 좌우 앞바퀴의 방향을 변경함.
조향시스템은 조작부에서 기어부와 연결되어 회전력을 조향 기어부에 전달하고, 조작부에서 회전운동을 직선운동으로 바꿔줌. 링크부에서 바퀴로 전달함.
EPS = MDPS 자율주행차 구현을 위한 필수 조건
조향 - 조향축 회전 - 피니언 회전 - 랙 직선운동 - 좌우 직선운동 - 방향 바뀜
R타입과 C타입이 있음.
R타입은 Rack부위에 충분한 공간이 필요, 출력이 더 큼.
차로유지시스템은 차선과 헤딩각 오차만 중요하지만 자율주행차는 그 이상의 것
횡방향 오차, 헤당각 오차가 차로유지시스템에 중요함. 이 둘이 0가 되면 잘 작동하는 것.
이런 제어에 PID 제어가 가장 많이 쓰인다. 자동차의 특성을 이해하면 자동차를 원하는 대로 움직이게 할 수 있다. -> 제어공학
오차 비례, 오차 적분, 오차 미분을 모두 고려해 각각을 상수와 곱한 뒤 모두 합함.
POSITION 제어 -> 현재 위치를 피드백받아 목표 위치와의 차이를 에러로 놓고, 목표점에 도달하면 속력이 나오지 않는 제어기를 구성할 수 있음.
적분제어기를 추가 사용해 오차를 줄일 수 있음 (배터리 구동에 필요한 rpm을 빼는 등)
D 제어기: 적분 제어기 이득 값이 큰 경우 오버슛 발생. 오차의 변화량(미분값)을 이용한 추가 제어 필요.
실제 플랜트모델을 대략 구한 후 제어기를 튜닝해 나감. 파라미터들을 조금씩 조절해주면서
이런 개발을 위해 SIL, HIL, VIL을 거치게 된다. 가상-하드웨어-실차
SIL에서 IPG CarMaker가 사용됨.
수학적으로 모델링하기 어려운 건 HIL과 연동함. 통신에서 CAN, TCP/IP 사용 (카메라, EPS를 추가해 사용할 수도 있음)
Basic Path Planning
제어에 필요한 기본 경로계획 설명
ADAS에서 경로계획은 횡방향제어에 필요함.
레벨 1에서는 주어진 차선을 잘 따라가면 된다. 차선 검출이 가장 큰 이슈. 3차 다항식으로 뽑아내게 된다. BEV에서 차량 좌표계 기준으로. 모빌아이가 가장 잘 함. 딥러닝 이전에도.
레벨 2에서는 멀티레인센싱이 필요함. 광각 카메라가 필요함. 인지를 넘어 차로를 변경할 수 있느냐에 대한 Rule-Based 경로계획이 필요함.
대표적으로 다항식 방식과 필요 가속 계산 (두번 적분하면 포지션), 지오메트릭하게 베지어커브(차선을 스무스하게), 동역할을 이용해 MPC 기반 경로계획을 만들기도 함.
레벨 3에서는 차로변경과 더불어 충돌을 막아야 한다. 장애물의 행동예측 등이 필요함. 대표적으로 candidate & selection 방법이 필요함. 경로계획 nnn개를 풀어놔서 ...
레벨 4, 5에선 도심지 자율주행을 포함해서 모든 도로에서 작동해야 함. 라이다를 통한 위치정확도 확보에 많은 노력을 한다. SLAM 등 위치정확도와 경로계획에 많은 노력이 필요함.
SLAM은 사실 로봇에서 많이 쓰이는데, 주어진 경로를 잘 따라간다는 면에서 자동차와 동일하기 때문이다.
그러나 로봇과 달리 차선, 신호등, 규칙, 알려진 환경, 포장여부를 고려해야 한다.
요즘은 PBV와 같이 로봇과 차량의 경계가 무너지고 있다.
그런데 자동차는 제약이 훨씬 많으므로 정밀지도를 사용한다. 그런데 정밀지도는 자동차의 움직임은 고려하지 않고 도로 그 자체를 설명한다. (점과 선으로 링크와 노드.)
예를 들어 커브는 미분이 연속적이어야 하는데 HD지도의 일부분은 미분불가능하게 구현된 경우가 있다.
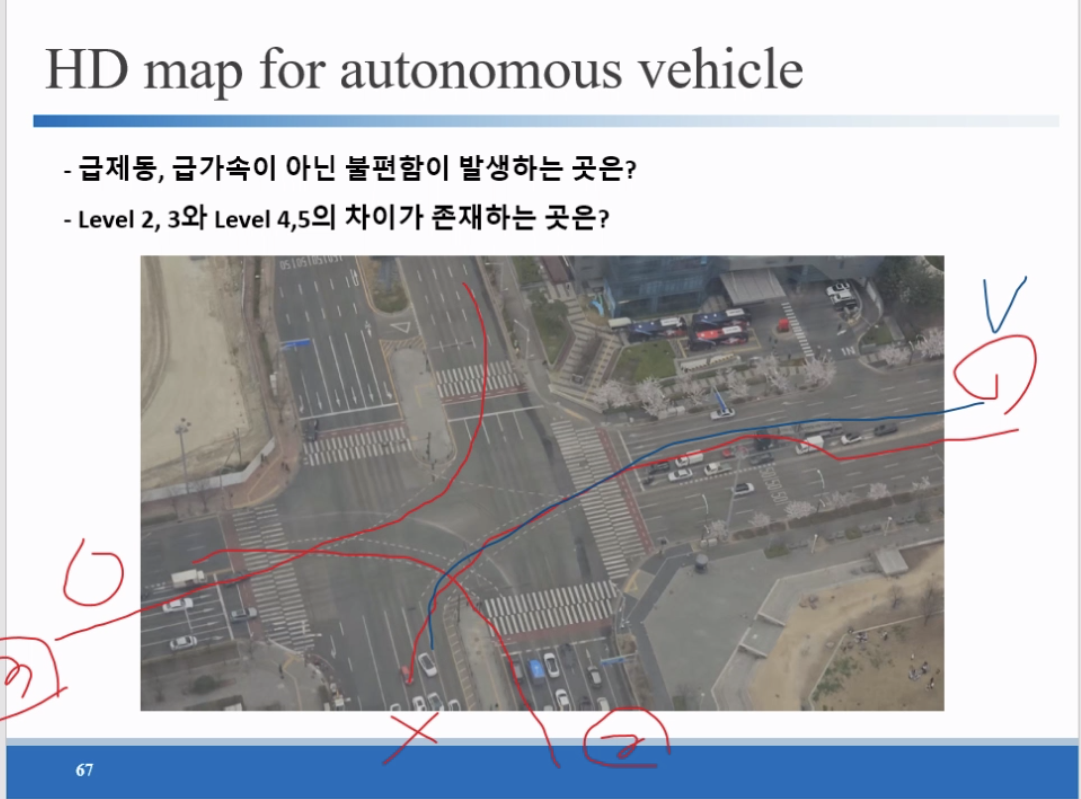
1번 경로는 현실과 이상이 거리가 멀다. 제시된 경로대로 운전하면 불쾌한 승차감을 유발한다. BEV를 고려해서 차선을 그리지 않기 때문에.
사람은 반지름과 속도가 함께 높아지는 경로를 선호한다. 그 반대의 경우 유도선을 지키지 않고 주행하는 1번 형태의 주행이 나오게 된다.
따라서 지도 기반 경로계획에 논쟁이 있다.
인지/판단: 인식과 전역경로가 잘 주어졌는데 왜 안되나요? 도로를 추종
제어/평가: 승차감을 위해 도로를 일부 이탈하는 경로계획 -> 그런데 얼마나 이탈을 허용할 것인가?
균형을 맞춰야 한다. 지금은 저속위주 개발이지만 고속에선 그 균형을 맞추기 더욱 어려울 것임.
이를 해결하기 위해 MPC를 경로계획에 사용한다. 경로계획+제어를 통해 제약조건을 지킬 수 있게 설계함.
주어진 차량 모델을 이산화하고 미래를 예측하는 제어기를 설계
제약조건과 비용함수를 고려할 수 있음.
어떤 이는 차로 왼쪽에 붙어서 가고 어떤 이는 중앙에 맞춰서 간다. (제약조건)
승차감을 위한 (비용함수)
Tube based MPC는 튜브형태의 제약조건으로, 미래 궤적이 항상 튜브 경계 내에 있도록 설꼐함, 튜브 크기를 조정해 제어 성능과 제약 조건 만족을 조절할 수 있음.
강화학습도 많이 쓰임. 제어는 하지 않지만 경로계획에서 많이 사용함. 모르는 환경에서 (에이전트가) 리워드가 최대가 되는 행동을 선택하는 정책을 찾는 것.
역강화학습도 있음. Best Driver Model으로 리워드함수를 찾는 것.
MAP의존도가 높은 자율주행의 경우 지도를 잘 따라가야 한다는 제약 때문에 (로봇 위주의 정책이기 때문에) 움직임이 불편해질 수 있음.
바닥에 매설된 와이어와 자석과 같은 고정된 이정표를 사용함. = AGV, Automated Ground Vehicle
그런 면에서 맵에만 의존하는 자율주행은 AGV와 다를 바 없다. (문제가 많다는 것)
Control for Mobility
1920년대 Radio Controlled Automobile
DARPA Grand Challenge 2005 사막 자율주행 챌린지
이후 2010년대 초반부터 구글 주도 자율주행 개발 시작
테슬라는 라이다 없이 도전 중.. 지금까지는 레벨 2~3 수준이라고 평가한다고 하는데 개인적으로는 그 이상 수준으로 보이는데..
상용화 - 물류 위주로. 라스트마일비히클은 추후 이슈
로보틱스 역시 LLM을 솔루션에 통합하는 방향으로 가고 있음.
CLIP 이후의 연구에서 보았듯 결국 비전 도메인은 LLM을 뺴놓을 수 없는 방향인듯, 성능 측면과 확장성 측면에서 특히 그렇다.
Perception 이후 제어 단계에서 어떻게 LLM을 이용할지 .. 좋은 아이디어를 낸다면 큰 업적이 될 듯.
그리고 그 통합을 Edge-Device 형태로 어떻게 상용화 것인지도 또 다른 문제
'Mobility' 카테고리의 다른 글
| EV진단사 필기시험 후기 + 샘플문제 답안 + 기출문제 (2) | 2024.06.24 |
|---|---|
| 자율주행(판단) 특강 정리 - 현대엔지비 (1) | 2024.06.12 |
| EV진단사 자격검정을 접수했습니다. (1) | 2024.06.10 |
| 인상적인 글 (0) | 2024.04.30 |
| BMW 520i M Sport (G60) 브루클린 그레이 모아보기 (2) | 2024.04.19 |